專利地圖及專題文章:AI專利解析-人工智慧菇類栽培監控系統及方法

 31460
31460
來源: Rex Wang 2024-05-22
AI專利解析-人工智慧菇類栽培監控系統及方法
發明名稱:自主移動式人工智慧菇類栽培監控系統及方法
申請日:111(2022)/07/28
申請人:國立虎尾科技大學(TW)
發明專利第I806721號
一、 AI專利-用於菇類栽培
本發明之AI技術係揭露一種自主移動式人工智慧菇類栽培監控系統及方法,其包括單兵式自主移動巡檢載具10、影像擷取單元13、生長環境感測單元30、場域圖資建置模組26、生長狀態辨識模組27、巡檢路徑規劃模組28及生長環境調控模組30。以影像擷取單元13擷取菇類栽培場域1內的地圖影像及菇類影像。以場域圖資建置模組26依據地圖影像建置地面通道圖資及菇籃置架圖資。
以生長環境感測單元30感測菇類之生長環境數據。以生長狀態辨識模組27將菇類影像與基準菇類影像比對而判斷菇類是否為遲緩生長。藉以達到單兵作業以簡化系統且能智慧有效地對於菇類栽培場域1進行生長監控之目的,並大幅減低依賴人力的需求。

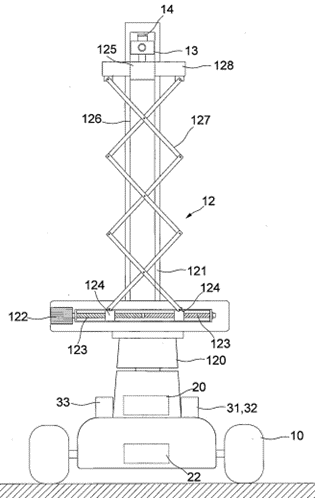 本發明單兵式自主移動巡檢載具之示意圖
本發明單兵式自主移動巡檢載具之示意圖
 本發明具體架構之功能方塊示意圖
本發明具體架構之功能方塊示意圖
二、 AI專利之技術內容
(一)當前「菇類栽培監控」技術領域所遭遇到的困難與瓶頸
按,傳統的菇類產業,需要依靠大量的人力進行巡檢工作,庫房內的環境狹窄潮濕且庫房的數量眾多,若以傳統人力來進行巡檢工作,會耗費大量時間與人員配置;另外菇類於成熟時所擴散的孢子,也會對菇農的呼吸道造成影響。若能將智慧農業應用在菇類產業上,將可大幅減低依賴人力的需求,並達到自動化生產的目標。
(二)AI專利之系統架構
有鑑於上述傳統菇類栽培監控所存在的問題,係提供一種自主移動式人工智慧菇類栽培監控系統及方法,配合底下本發明圖示,其中該巡檢路徑規劃模組28依據地面通道圖資而規劃設定行走路徑及位在行走路徑上的複數個停駐位置pa,及依據菇籃置架圖資而規劃設定檢測路徑及位在檢測路徑上的複數個檢測位置pb。
以行走控制模組控制單兵式自主移動巡檢載具10依據行走路徑而在地面通道行走及於每一停駐位置pa停駐。影像擷取單元13及生長環境感測單元30隨著單兵式自主移動巡檢載具10及移載機構而依序移動至每一停駐位置pa及檢測位置pb,以擷取菇類影像及感測生長環境數據。
當生長狀態辨識模組27判斷菇類為遲緩生長時,生長環境調控模組30依據資料庫中預設而相符合的一第一生長環境條件參數來調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度,以加速菇類生長。藉以達到單兵作業以簡化系統且能智慧有效地對於菇類栽培場域1進行生長監控之目的。
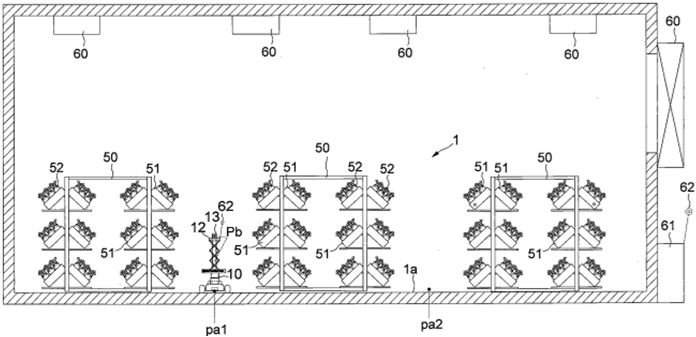 AI單兵式自主移動巡檢載具於菇類栽培場域巡檢之示意圖
換言之,當該生長環境調控模組600用以驅動至少一生長環境調控設備以調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度;其中,當該生長狀態辨識模組27判斷該至少一菇類為遲緩生長時,該生長環境調控模組600則依據該資料庫中預設而相符合的一第一生長環境條件參數來調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度,以加速該至少一菇類生長。
AI單兵式自主移動巡檢載具於菇類栽培場域巡檢之示意圖
換言之,當該生長環境調控模組600用以驅動至少一生長環境調控設備以調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度;其中,當該生長狀態辨識模組27判斷該至少一菇類為遲緩生長時,該生長環境調控模組600則依據該資料庫中預設而相符合的一第一生長環境條件參數來調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度,以加速該至少一菇類生長。
 AI各監控區域的生長環境圖表及數據的畫面顯示之示意圖
(三)AI專利之系統架構之訓練方式
如底下本發明圖式,其中該生長狀態辨識模組27更包括一菇類數量預估模組210,該菇類數量預估模組210更包括一人工智慧深度學習模組210a,又該人工智慧深度學習模組210a依據一訓練學習步驟而於該特徵資料庫211建立一菇類數量計算演算模型212,於菇類數量計算演算模型212型輸入巨量的菇類頭部特徵樣本、菇類特徵參數、人工智慧框選參數及影像辨識參數,並由菇類數量計算演算模型212測試各菇類影像的影像辨識正確率,再判斷各菇類影像的影像辨識正確率是否足夠,當判斷結果為是,則將辨識結果輸出及儲存;
當判斷結果為否,則使該菇類數量計算演算模型212自我修正學習;該人工智慧深度學習模組210a執行影像辨識處理時,則執行一預測階段步驟,係於菇類數量計算演算模型212依序輸入即時連續輸入已經裁切的菇類影像,並由菇類數量計算演算模型212預測辨識出所即時輸入之菇類影像所代表的菇類數量預估值,然後再預測辨識出整個菇類栽培場域1的菇類數量預估資訊。
AI各監控區域的生長環境圖表及數據的畫面顯示之示意圖
(三)AI專利之系統架構之訓練方式
如底下本發明圖式,其中該生長狀態辨識模組27更包括一菇類數量預估模組210,該菇類數量預估模組210更包括一人工智慧深度學習模組210a,又該人工智慧深度學習模組210a依據一訓練學習步驟而於該特徵資料庫211建立一菇類數量計算演算模型212,於菇類數量計算演算模型212型輸入巨量的菇類頭部特徵樣本、菇類特徵參數、人工智慧框選參數及影像辨識參數,並由菇類數量計算演算模型212測試各菇類影像的影像辨識正確率,再判斷各菇類影像的影像辨識正確率是否足夠,當判斷結果為是,則將辨識結果輸出及儲存;
當判斷結果為否,則使該菇類數量計算演算模型212自我修正學習;該人工智慧深度學習模組210a執行影像辨識處理時,則執行一預測階段步驟,係於菇類數量計算演算模型212依序輸入即時連續輸入已經裁切的菇類影像,並由菇類數量計算演算模型212預測辨識出所即時輸入之菇類影像所代表的菇類數量預估值,然後再預測辨識出整個菇類栽培場域1的菇類數量預估資訊。
 AI人工智慧深度學習模組於訓練階段的流程實施示意圖
AI人工智慧深度學習模組於訓練階段的流程實施示意圖
 AI人工智慧深度學習模組於預測階段的流程之示意圖
(四)AI專利之系統可達到功效
1. 本發明確實可以藉由可視化生長環境圖表的機能設置,以供監控者以更為快速地解讀出菇類生長環境資訊,以營建出更為適合菇類栽種生長的環境。
2. 本發明確實具備菇類產量預測功能的菇類栽培物聯網監測系統及方法,主要是可以利用大數據收集、人工智慧框選及訓練,以對庫房內的菇類進行生產數量的預測。
3. 本發明確實可以讓影像擷取單元可以穩定地增加縱向伸縮位移距離的自菇類栽培物聯網監測系統及方法。
4. 本發明確實具備具備熱像儀感測菇類自身生長溫度的功能。
5. 本發明具備可以因應市場需求而加快或減緩菇類生長速度的功能。
AI人工智慧深度學習模組於預測階段的流程之示意圖
(四)AI專利之系統可達到功效
1. 本發明確實可以藉由可視化生長環境圖表的機能設置,以供監控者以更為快速地解讀出菇類生長環境資訊,以營建出更為適合菇類栽種生長的環境。
2. 本發明確實具備菇類產量預測功能的菇類栽培物聯網監測系統及方法,主要是可以利用大數據收集、人工智慧框選及訓練,以對庫房內的菇類進行生產數量的預測。
3. 本發明確實可以讓影像擷取單元可以穩定地增加縱向伸縮位移距離的自菇類栽培物聯網監測系統及方法。
4. 本發明確實具備具備熱像儀感測菇類自身生長溫度的功能。
5. 本發明具備可以因應市場需求而加快或減緩菇類生長速度的功能。
三、 結論
綜上所述,本發明係主要基於降低巡檢人力的需求,係利用現有菇房場域配置設計開發一台具有自我導航、避障、多點巡航及各式感測器資料蒐集並上傳資料庫的自主移動式智慧物聯模組,該模組是利用影像辨識與人工智慧技術,來達到菇類生產環境監控與生產數量預測的目的。
再者,本發明之自主移動式智慧物聯模組是基於移動機器人底盤架構來進行開發設計,即本模組是基於Ubuntu建置機器人操作系統(Robot Operating System,ROS),透過光學雷達(Lidar)來知道與障礙物的位置與距離,再與模組上的慣性測量單元(Inertial MeasurementUnit,IMU)、直流減速馬達帶霍爾編碼器上的霍爾回授的參數結合判斷,以達到自我導航、避障、多點巡航的目的。而其生產預測數量則利用大數據收集、人工智慧框選及訓練,讓自主移動式智慧物聯模組在生產庫房間拍照,即可對於庫房內的杏鮑菇外型進行生產數量預測的目的。
若有企業先進或創業家欲對本專題或創新議題或相關專利內容想要進一步瞭解者,或對某產業技術進行FTO、專利地圖分析、專利檢索、專利申請及各專利舉發及迴避設計分析,敬請隨時歡迎電洽:中銓國際專利商標事務所熱線:04-23823629,將派專人提供服務。
資料來源: 中華民國專利資訊檢索系統
關鍵字: AI、人工智慧、人工智能、專利、菇類生產、多點巡航、環境監控、大數據
發明名稱:自主移動式人工智慧菇類栽培監控系統及方法
申請日:111(2022)/07/28
申請人:國立虎尾科技大學(TW)
發明專利第I806721號
一、 AI專利-用於菇類栽培
本發明之AI技術係揭露一種自主移動式人工智慧菇類栽培監控系統及方法,其包括單兵式自主移動巡檢載具10、影像擷取單元13、生長環境感測單元30、場域圖資建置模組26、生長狀態辨識模組27、巡檢路徑規劃模組28及生長環境調控模組30。以影像擷取單元13擷取菇類栽培場域1內的地圖影像及菇類影像。以場域圖資建置模組26依據地圖影像建置地面通道圖資及菇籃置架圖資。
以生長環境感測單元30感測菇類之生長環境數據。以生長狀態辨識模組27將菇類影像與基準菇類影像比對而判斷菇類是否為遲緩生長。藉以達到單兵作業以簡化系統且能智慧有效地對於菇類栽培場域1進行生長監控之目的,並大幅減低依賴人力的需求。
本發明單兵式自主移動巡檢載具之示意圖
本發明具體架構之功能方塊示意圖
二、 AI專利之技術內容
(一)當前「菇類栽培監控」技術領域所遭遇到的困難與瓶頸
按,傳統的菇類產業,需要依靠大量的人力進行巡檢工作,庫房內的環境狹窄潮濕且庫房的數量眾多,若以傳統人力來進行巡檢工作,會耗費大量時間與人員配置;另外菇類於成熟時所擴散的孢子,也會對菇農的呼吸道造成影響。若能將智慧農業應用在菇類產業上,將可大幅減低依賴人力的需求,並達到自動化生產的目標。
(二)AI專利之系統架構
有鑑於上述傳統菇類栽培監控所存在的問題,係提供一種自主移動式人工智慧菇類栽培監控系統及方法,配合底下本發明圖示,其中該巡檢路徑規劃模組28依據地面通道圖資而規劃設定行走路徑及位在行走路徑上的複數個停駐位置pa,及依據菇籃置架圖資而規劃設定檢測路徑及位在檢測路徑上的複數個檢測位置pb。
以行走控制模組控制單兵式自主移動巡檢載具10依據行走路徑而在地面通道行走及於每一停駐位置pa停駐。影像擷取單元13及生長環境感測單元30隨著單兵式自主移動巡檢載具10及移載機構而依序移動至每一停駐位置pa及檢測位置pb,以擷取菇類影像及感測生長環境數據。
當生長狀態辨識模組27判斷菇類為遲緩生長時,生長環境調控模組30依據資料庫中預設而相符合的一第一生長環境條件參數來調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度,以加速菇類生長。藉以達到單兵作業以簡化系統且能智慧有效地對於菇類栽培場域1進行生長監控之目的。
AI單兵式自主移動巡檢載具於菇類栽培場域巡檢之示意圖
換言之,當該生長環境調控模組600用以驅動至少一生長環境調控設備以調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度;其中,當該生長狀態辨識模組27判斷該至少一菇類為遲緩生長時,該生長環境調控模組600則依據該資料庫中預設而相符合的一第一生長環境條件參數來調控該菇類栽培場域1內的溫度、濕度及二氧化碳濃度,以加速該至少一菇類生長。
AI各監控區域的生長環境圖表及數據的畫面顯示之示意圖
(三)AI專利之系統架構之訓練方式
如底下本發明圖式,其中該生長狀態辨識模組27更包括一菇類數量預估模組210,該菇類數量預估模組210更包括一人工智慧深度學習模組210a,又該人工智慧深度學習模組210a依據一訓練學習步驟而於該特徵資料庫211建立一菇類數量計算演算模型212,於菇類數量計算演算模型212型輸入巨量的菇類頭部特徵樣本、菇類特徵參數、人工智慧框選參數及影像辨識參數,並由菇類數量計算演算模型212測試各菇類影像的影像辨識正確率,再判斷各菇類影像的影像辨識正確率是否足夠,當判斷結果為是,則將辨識結果輸出及儲存;
當判斷結果為否,則使該菇類數量計算演算模型212自我修正學習;該人工智慧深度學習模組210a執行影像辨識處理時,則執行一預測階段步驟,係於菇類數量計算演算模型212依序輸入即時連續輸入已經裁切的菇類影像,並由菇類數量計算演算模型212預測辨識出所即時輸入之菇類影像所代表的菇類數量預估值,然後再預測辨識出整個菇類栽培場域1的菇類數量預估資訊。
AI人工智慧深度學習模組於訓練階段的流程實施示意圖
AI人工智慧深度學習模組於預測階段的流程之示意圖
(四)AI專利之系統可達到功效
1. 本發明確實可以藉由可視化生長環境圖表的機能設置,以供監控者以更為快速地解讀出菇類生長環境資訊,以營建出更為適合菇類栽種生長的環境。
2. 本發明確實具備菇類產量預測功能的菇類栽培物聯網監測系統及方法,主要是可以利用大數據收集、人工智慧框選及訓練,以對庫房內的菇類進行生產數量的預測。
3. 本發明確實可以讓影像擷取單元可以穩定地增加縱向伸縮位移距離的自菇類栽培物聯網監測系統及方法。
4. 本發明確實具備具備熱像儀感測菇類自身生長溫度的功能。
5. 本發明具備可以因應市場需求而加快或減緩菇類生長速度的功能。
三、 結論
綜上所述,本發明係主要基於降低巡檢人力的需求,係利用現有菇房場域配置設計開發一台具有自我導航、避障、多點巡航及各式感測器資料蒐集並上傳資料庫的自主移動式智慧物聯模組,該模組是利用影像辨識與人工智慧技術,來達到菇類生產環境監控與生產數量預測的目的。
再者,本發明之自主移動式智慧物聯模組是基於移動機器人底盤架構來進行開發設計,即本模組是基於Ubuntu建置機器人操作系統(Robot Operating System,ROS),透過光學雷達(Lidar)來知道與障礙物的位置與距離,再與模組上的慣性測量單元(Inertial MeasurementUnit,IMU)、直流減速馬達帶霍爾編碼器上的霍爾回授的參數結合判斷,以達到自我導航、避障、多點巡航的目的。而其生產預測數量則利用大數據收集、人工智慧框選及訓練,讓自主移動式智慧物聯模組在生產庫房間拍照,即可對於庫房內的杏鮑菇外型進行生產數量預測的目的。
若有企業先進或創業家欲對本專題或創新議題或相關專利內容想要進一步瞭解者,或對某產業技術進行FTO、專利地圖分析、專利檢索、專利申請及各專利舉發及迴避設計分析,敬請隨時歡迎電洽:中銓國際專利商標事務所熱線:04-23823629,將派專人提供服務。
資料來源: 中華民國專利資訊檢索系統
關鍵字: AI、人工智慧、人工智能、專利、菇類生產、多點巡航、環境監控、大數據
關鍵字:#AI #人工智慧 #專利 #多點巡航 #環境監控 #大數據 #專題文章